
Page 145 - 捷運工程叢書 精進版 - 23 捷運行車監控系統通訊式列車控制技術
P. 145
第三章 環狀線(第一階段)行車監控系統通訊式列車控制(CBTC)技術
五、ATS 通報列車位置
車載控制器將列車位置發送至 ATS。ATS 功能將運用此位置,像是用來指派旅次號碼、
列車調度員與乘客資訊,抑或是管理連接處。
( 一 ) CBTC 列車識別與列車追蹤
每列裝有 CBTC 的列車,將基於列車管理之用,由區域控制器指定列車追蹤
識別碼(TID)。所有列車的位置,將按照車載控制器的列車位置報告來追蹤。列
車位置和對 ATS 有用的所有列車資訊,將會傳送給 ATS。
( 二 ) 非 CBTC 列車識別與列車追蹤
ATS 會針對每部裝有及未裝 CBTC 的列車、或者是所裝 CBTC 設備故障的列
車,指定裝設及未裝設備的相關列車識別碼(TID)。一旦經過識別,這些列車將
透過聯鎖(IXL)設備通報的軌道電路佔據空間來追蹤。
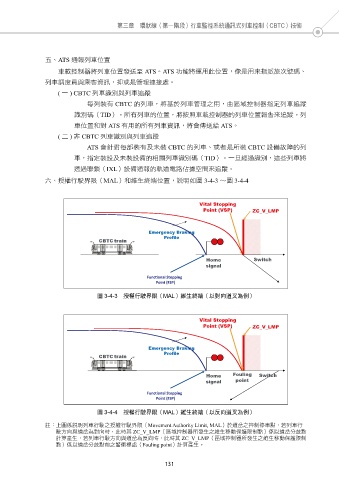
六、授權行駛界限(MAL)和維生終端位置,說明如圖 3-4-3 ~圖 3-4-4
Vital Stopping
Point (VSP) ZC_V_LMP
Emergency Braking
Profile
Home Switch
signal
Func�onal Stopping
Point (FSP)
圖 3-4-3 授權行駛界限(MAL)維生終端(以對向道叉為例)
Vital Stopping
Point (VSP) ZC_V_LMP
Emergency Braking
Profile
Home Fouling Switch
signal point
Func�onal Stopping
Point (FSP)
圖 3-4-4 授權行駛界限(MAL)維生終端(以反向道叉為例)
註: 上圖係說明列車行駛之授權行駛界限(Movement Authority Limit, MAL)於道岔之控制停車點,若列車行
駛方向與道岔為對向時,此時其 ZC_V_LMP(區域控制器所發生之維生移動保護限制點)係以道岔分歧點
計算產生,若列車行駛方向與道岔為反向時,此時其 ZC_V_LMP(區域控制器所發生之維生移動保護限制
點)係以道岔分歧點前之警衝標處(Fouling point)計算產生。
131