
Page 143 - 捷運工程叢書 精進版 - 23 捷運行車監控系統通訊式列車控制技術
P. 143
第三章 環狀線(第一階段)行車監控系統通訊式列車控制(CBTC)技術
2. 列車位移量測值。
3. 轉轍器指示(為了在通過轉轍器時更新列車位置)。
車載控制器資料庫會儲存軌道網路。車載控制器係於考量到上述項目下,參照
資料庫以算出列車位置。車載資料庫傳送算出的位置至區域控制器。
( 二 ) 定位過程
車載控制器定位出每列裝備列車的過程,包括「初始化」階段和更新階段。
車載控制器須偵測到 2 個相鄰信標,其量測得出的實際間距,須透過資料庫驗證,
才能完成初始化階段。一旦初始化之後,列車位置就會依照偵測信標、列車位移
量測值和道岔指示持續更新。
( 三 ) 信標
信標為設置在軌床上的單向通訊(道旁 > 車輛)被動裝置,利用列車上的信
標詢問器天線訊號來作動。列車駛過信標時,會接收到數位訊息以辨識信標,然
後輸入資料至軌道資料庫,進而提供信標點的地理位置。
( 四 ) 列車定位參數
列車定位係以下列參數來描述:
1. 列車位置
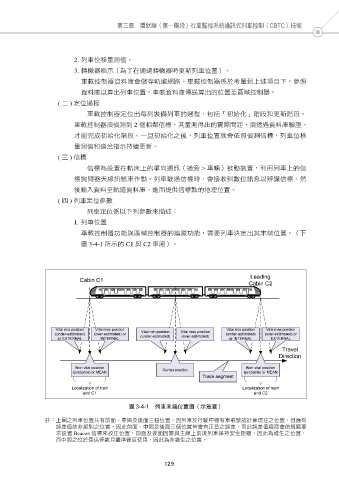
車載控制器功能與區域控制器的追蹤功能,需要列車決定出其末端位置。(下
圖 3-4-1 所示的 C1 與 C2 車廂)。
圖 3-4-1 列車末端位置圖(示意圖)
註: 上圖之列車位置共有前面、中間及後面三個位置,因列車於行駛中雖有車載號誌計算現在之位置,但應有
誤差值故非絕對之位置,因此前面、中間及後面三個位置皆會有正負之誤差,而此誤差值廠商會依規範要
求設置 Beacon 信標來校正位置,前面及後面因需與主線上前後列車保持安全距離,因此為維生之位置,
而中間之位於係供停靠月臺準確度使用,因此為非維生之位置。
129