
Page 144 - 捷運工程叢書 精進版 - 23 捷運行車監控系統通訊式列車控制技術
P. 144
臺北市政府捷運工程局
2. 列車方位
列車方位係在對照軌道描述資料庫界定的一般方向下,呈現出列車採用的一般
行車方向。
3. 行車方向
此項參數係在對照車載控制器資料庫所示的邏輯網路一般方向下,列車依照啟
用駕駛室而採用的行駛方向。區域控制器使用行車方向來描述移動保護限制點
(LMP)。
四、區域控制器追蹤列車功能
此項功能涉及區域控制器(ZC)和車載控制器(CC)子系統:區域控制器透過相互比
較及對照軌道上的固定障礙物,進而決定出列車位置。列車追蹤功能的主要目的,在於提供
安全區隔列車所需的資料。這些資料可以採網路圖的形式瀏覽,藉此顯示所有列車(CBTC
列車、無裝備列車及無通訊列車)在軌道網路中的位置。
區域控制器將按照下列幾點,來建立軌道佔據圖:
( 一 ) 聯鎖(IXL)設備針對未傳達所在位置的列車,所提供的軌道電路佔據空間(係指
無裝備列車或車載設備故障的列車,這些列車稱為「無通報」或「無通訊」列車)。
( 二 ) 區域控制器(經由 DCS)提供的列車位置報告。
( 三 ) 道岔位置。
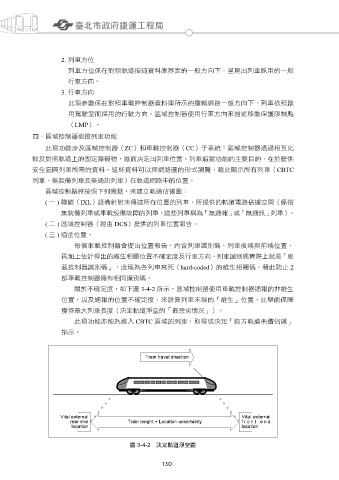
每個車載控制器會提出位置報告,內含列車識別碼、列車後端與前端位置、
再加上估計得出的維生相關位置不確定度及行車方向。列車識別碼實際上就是「車
載控制器識別碼」,此碼為各列車寫死(hard-coded)的維生相關碼,藉此防止 2
部車載控制器擁有相同識別碼。
關於不確定度,如下圖 3-4-2 所示,區域控制器使用車載控制器通報的非維生
位置,以及通報的位置不確定度,來計算列車末端的「維生」位置。此舉能保障
獲得最大列車長度(決定軌道淨空的「最惡劣情況」)。
此項功能亦能為進入 CBTC 區域的列車,取得或決定「前方軌道未遭佔據」
指示。
圖 3-4-2 決定軌道淨空圖
130 131