
Page 36 - 捷運工程叢書 精進版 - 23 捷運行車監控系統通訊式列車控制技術
P. 36
臺北市政府捷運工程局
一、 高解析度之列車位置偵測 (誤差值小於 10 公尺),且此列車位置偵測不須依賴軌道
電路。
二、 列車與道旁(或行控中心)之行車監控資訊,透過雙向高容量之數據通訊方式,即時連
續傳送。
三、負責車載及道旁功能之控制系統須執行維生功能。
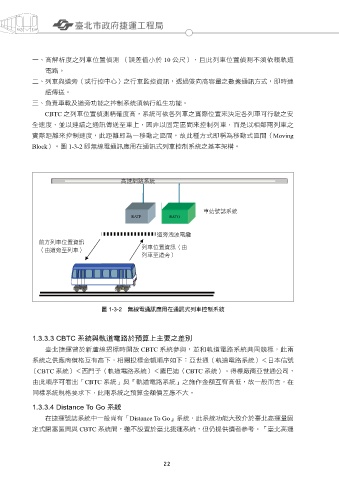
CBTC 之列車位置偵測精確度高,系統可依各列車之實際位置來決定各列車可行駛之安
全速度,並以連續之通訊傳送至車上,因非以固定區間來控制列車,而是以相鄰兩列車之
實際距離來控制速度,此距離即為一移動之區間,故此種方式即稱為移動式區間(Moving
Block)。圖 1-3-2 即無線電通訊應用在通訊式列車控制系統之基本架構。
高速網路系統
車站號誌系統
RATP RATO
道旁洩波電纜
前方列車位置資訊
(由道旁至列車) 列車位置資訊(由
列車至道旁)
圖 1-3-2 無線電通訊應用在通訊式列車控制系統
1.3.3.3 CBTC 系統與軌道電路於預算上主要之差別
臺北捷運曾於新蘆線招標時開放 CBTC 系統參與,並和軌道電路系統共同競標,此兩
系統之供應商價格互有高下,相關投標金額順序如下:亞世通(軌道電路系統)<日本信號
(CBTC 系統)<西門子(軌道電路系統)<龐巴迪(CBTC 系統)。得標廠商亞世通公司,
由此順序可看出「CBTC 系統」與「軌道電路系統」之施作金額互有高低,故一般而言,在
同樣系統規格要求下,此兩系統之預算金額價差應不大。
1.3.3.4 Distance To Go 系統
在捷運號誌系統中一般尚有「Distance To Go」系統,此系統功能大致介於臺北高運量固
定式閉塞區間與 CBTC 系統間,雖不設置於臺北捷運系統,但仍提供讀者參考。「臺北高運
22 23