
Page 28 - 捷運工程叢書 精進版 - 23 捷運行車監控系統通訊式列車控制技術
P. 28
臺北市政府捷運工程局
以增加系統之可用度,列車之車廂內亦配置完整之監視及通訊系統,俾便乘客能與行控
中心隨時保持通訊的順暢,行控中心亦能隨時掌握旅客狀況。臺北捷運有人駕駛及無人
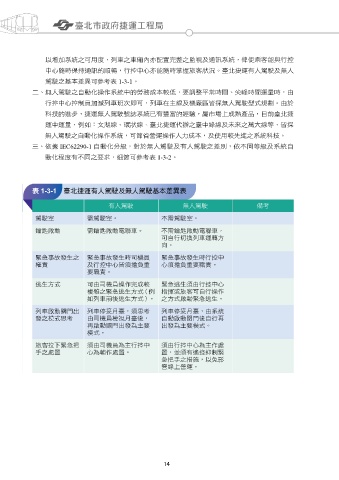
駕駛之基本差異可參考表 1-3-1。
二、 無人駕駛之自動化操作系統中的勞務成本較低,要調整平常時間、尖峰時間運量時,由
行控中心控制員加減列車班次即可,列車在主線及機廠區皆採無人駕駛型式規劃。由於
科技的進步,捷運無人駕駛號誌系統已有豐富的經驗,屬市場上成熟產品,目前臺北捷
運中運量,例如:文湖線、環狀線、臺北捷運代辦之臺中綠線及未來之萬大線等,皆採
無人駕駛之自動化操作系統,可節省營運操作人力成本,及使用較先進之系統科技。
三、 依據 IEC62290-1 自動化分級,對於無人駕駛及有人駕駛之差別,依不同等級及系統自
動化程度有不同之要求,細節可參考表 1-3-2。
表 1-3-1 臺北捷運有人駕駛及無人駕駛基本差異表
有人駕駛 無人駕駛 備考
駕駛室 需駕駛室。 不需駕駛室。
鑰匙啟動 需鑰匙啟動電聯車。 不需鑰匙啟動電聯車,
可自行切換列車運轉方
向。
緊急事故發生之 緊急事故發生時司機員 緊急事故發生時行控中
權責 及行控中心皆須擔負重 心須擔負重要職責。
要職責。
逃生方式 可由司機員操作完成較 緊急逃生須由行控中心
複雜之緊急逃生方式(例 指揮或旅客可自行操作
如列車前後逃生方式)。 之方式啟動緊急逃生。
列車啟動關門出 列車停妥月臺,須思考 列車停妥月臺,由系統
發之模式思考 由司機員檢視月臺後, 自動啟動關門後自行再
再啟動關門出發為主要 出發為主要模式。
模式。
旅客拉下緊急把 須由司機員為主行控中 須由行控中心為主作處
手之處置 心為輔作處置。 置,並須有遙控抑制緊
急把手之措施,以免影
響線上營運。
14 15