
Page 180 - 捷運工程叢書 精進版 - 23 捷運行車監控系統通訊式列車控制技術
P. 180
臺北市政府捷運工程局
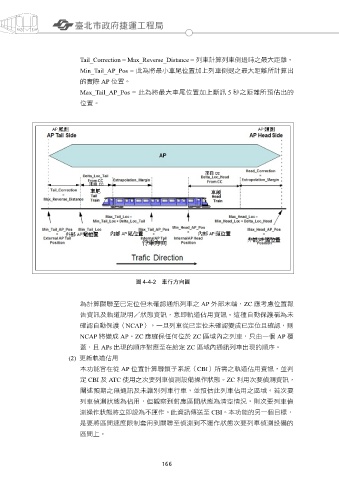
Tail_Correction = Max_Reverse_Distance = 列車計算列車倒退時之最大距離。
Min_Tail_AP_Pos = 此為將最小車尾位置加上列車倒退之最大距離所計算出
的實際 AP 位置。
Max_Tail_AP_Pos = 此為將最大車尾位置加上斷訊 5 秒之距離所預估出的
位置。
圖 4-4-2 車行方向圖
為計算關聯至已定位但未確認通訊列車之 AP 外部末端,ZC 應考慮位置報
告資訊及軌道說明/狀態資訊,意即軌道佔用資訊。這種自動保護稱為未
確認自動保護(NCAP)。一旦列車從已定位未確認變成已定位且確認,則
NCAP 將變成 AP。ZC 應確保任何位於 ZC 區域內之列車,只由一個 AP 覆
蓋,且 APs 出現的順序對應至在給定 ZC 區域內通訊列車出現的順序。
(2) 更新軌道佔用
本功能旨在從 AP 位置計算聯鎖子系統(CBI)所需之軌道佔用資訊,並判
定 CBI 及 ATC 使用之次要列車偵測設備操作狀態。ZC 利用次要偵測資訊,
闡述預期之無通訊及未識別列車行車,並預估此列車佔用之區域。若次要
列車偵測狀態為佔用,但觀察到對應區間狀態為清空情況,則次要列車偵
測操作狀態將立即設為不運作。此資訊傳送至 CBI。本功能的另一個目標,
是要將區間速度限制套用到關聯至偵測到不運作狀態次要列車偵測設備的
區間上。
166 167