
Page 177 - 捷運工程叢書 精進版 - 23 捷運行車監控系統通訊式列車控制技術
P. 177
第四章 臺中烏日文心北屯線行車監控系統通訊式列車控制(CBTC)技術
( 六 ) 啟用區域控制器
區域控制器在啟動電源後,直至接收到 ATS 具體發出的「開始(Start)」命令,
所有區域控制器功能才能啟用。
在進行導致所有區域控制器完全關閉或重新啟動的維修作業後,才會執行此
項功能。此時,區域控制器會失去潛在暫時速限(TSR)命令的儲存紀錄。此項
功能旨在讓 ATS 先傳送暫時速限至區域控制器後,才允許區域控制器傳送行駛
權限。
在正常運作中,區域控制器若沒有關閉,ATS 無須下令執行區域控制器功能。
二、管理控制模式
( 一 ) 駕駛模式
烏日文心北屯線之列車駕駛模式有四種模式,三種為有 ATO 及 ATP 子系統之
駕駛模式,另一種為 ATC 旁通或關閉模式之駕駛模式;而三種有 ATO 及 ATP 子
系統之駕駛模式功能分述如下:
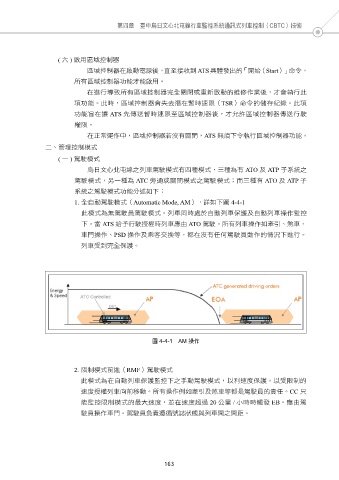
1. 全自動駕駛模式(Automatic Mode, AM),詳如下圖 4-4-1
此模式為無駕駛員駕駛模式。列車同時處於自動列車保護及自動列車操作監控
下。當 ATS 給予行駛授權時列車應由 ATO 駕駛。所有列車操作如牽引、煞車、
車門操作、PSD 操作及乘客交換等,都在沒有任何駕駛員動作的情況下進行。
列車受到完全保護。
圖 4-4-1 AM 操作
2. 限制模式前進(RMF)駕駛模式
此模式為在自動列車保護監控下之手動駕駛模式,以利速度保護。以受限制的
速度授權列車向前移動。所有操作例如牽引及煞車等都是駕駛員的責任。CC 只
能監控限制模式的最大速度,並在速度超過 20 公里 / 小時時觸發 EB。應由駕
駛員操作車門。駕駛員負責遵循號誌狀態與列車間之間距。
163