
Page 147 - 捷運技術 第59期
P. 147
137
向時會使得潛盾機盾尾與環片間空 而為考慮環片組裝問題,必
隙減少。因此對於急曲線施工的線 須控制任何一個位置的盾尾
形管理,須針對推進千斤頂衝程差、 間隙不得小於 10mm,以免環
盾尾間隙、潛盾機姿態及方向、環 片無法順利組裝。
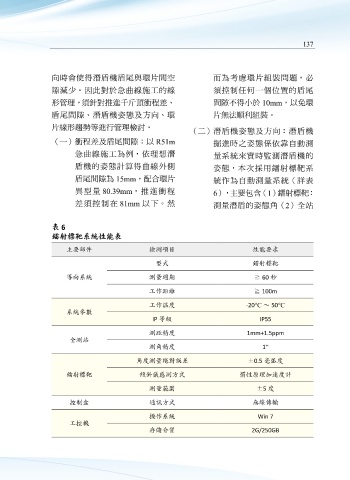
片線形趨勢等進行管理檢討。 (二) 潛盾機姿態及方向:潛盾機
(一) 衝程差及盾尾間隙:以 R51m 掘進時之姿態係依靠自動測
急曲線施工為例,依理想潛 量系統來實時監測潛盾機的
盾機的姿態計算得曲線外側 姿態,本次採用鐳射標靶系
盾尾間隙為 15mm,配合環片 統作為自動測量系統(詳表
異型量 80.39mm,推進衝程 6),主要包含(1)鐳射標靶:
差須控制在 81mm 以下。然 測量潛盾的姿態角(2)全站
表 6
鐳射標靶系統性能表
主要部件 檢測項目 性能要求
型式 鐳射標靶
導向系統 測量週期 ≧ 60 秒
工作距離 ≧ 100m
工作溫度 -20°C ∼ 50°C
系統參數
IP 等級 IP55
測距精度 1mm+1.5ppm
全測站
測角精度 1“
角度測量絕對誤差 ±0.5 毫弧度
鐳射標靶 傾斜儀感測方式 慣性原理加速度計
測量範圍 ±5 度
控制盒 通訊方式 無線傳輸
操作系統 Win 7
工控機
存儲介質 2G/250GB