
Page 50 - 捷運技術 第55期
P. 50
全自動無人駕駛系統(TMS)之技術應用---以環狀線TMS設計為例|范清欽等
列車網路架構中實體鏈結可能 助行控中心安排營運模式與車輛調度
包含乙太網路、MVB/CAN bus、 參考外,對於即時判定電聯車是否繼
WIFI、RS-485 等實體層之列車通訊 續營運或到站收車 ( 需參考設備設計
網路,無論硬體界面同步或非同步、 之餘裕度與備援程度 ),具關鍵的參
信號定義與解碼、信號傳輸率與錯 考地位,俾能提高無人駕駛系統的可
誤率、S/N 訊雜比高低、頻寬等等, 用度。
只要在傳輸架構與協定基礎上具一致 重大故障訊息一般定義為影響行
性,未來在系統更新或擴充延伸、系 車安全及營運中斷等之訊息 ( 如車門
統重置方面等能有依循之標準,能更 行駛中開啟、煞車 / 推進系統多重故
順利進行。 障、緊急煞車迴路作動等 ),該等故
障訊息需要即時與明確做出反應,並
I. 重大故障訊息回傳 即時傳回行控中心,協助自動列車監
重大故障訊息是電聯車 TMS 與號誌 督系統 (ATS) 與行控中心之現場控制
系統間重要的工作之一,即時傳送電 人員作出即時的回應。故障分級與顯
聯車重要子系統故障訊息對號誌自動 示部分,請參考本節 (L.) 故障分級顯
列車監督系統 ( 圖 9) 而言,不僅協 示與管理 [14]。
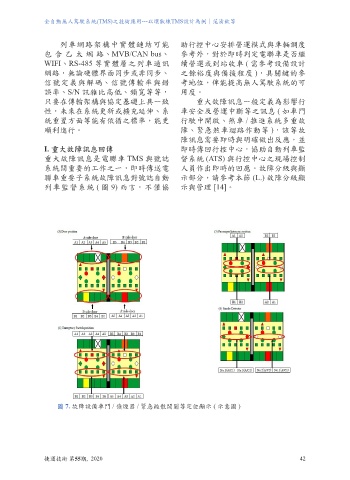
圖 7. 故障設備車門 / 偵煙器 / 緊急疏散開關等定位顯示 ( 示意圖 )
捷運技術 第55期, 2020 42