
Page 54 - 捷運技術 第55期
P. 54
全自動無人駕駛系統(TMS)之技術應用---以環狀線TMS設計為例|范清欽等
IV. 案例研究 ---- 以環狀線 TMS 設計為例
A. 列車管理系統架構,參照如下圖 :
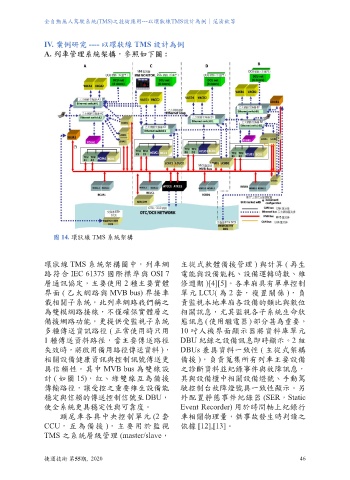
圖 14. 環狀線 TMS 系統架構
環狀線 TMS 系統架構圖中,列車網 主從式軟體備援管理 ) 與計算 ( 再生
路符合 IEC 61375 國際標準與 OSI 7 電能與設備能耗、設備運轉時數、維
層通訊協定,主要使用 2 種主要實體 修週期 )[4][5]。各車廂具有單車控制
界面 ( 乙太網路與 MVB bus) 界接車 單元 LCU( 為 2 套,複置關係 ),負
載相關子系統,此列車網路我們稱之 責監視本地車廂各設備的類比與數位
為雙模網路接線,不僅確保實體層之 相關訊息,尤其監視各子系統生命狀
備援網路功能,更提供受監視子系統 態訊息 ( 使用繼電器 ) 部分甚為重要。
多種傳送資訊路徑 ( 正常使用時只用 10 吋人機界面顯示器將資料庫單元
1 種傳送資料路徑,當主要傳送路徑 DBU 紀錄之設備訊息即時顯示。2 組
失效時,將啟用備用路徑傳送資料 ), DBUs 兼具資料一致性 ( 主從式架構
相關設備健康資訊與控制訊號傳送更 備援 ),負責蒐集所有列車主要設備
具信賴性。其中 MVB bus 為雙線設 之診斷資料並紀錄事件與故障訊息,
計 ( 如圖 15),紅、綠雙線互為備援 其與設備櫃中相關設備燈號、手動駕
傳輸路徑,讓受控之重要維生設備能 駛控制台故障燈號具一致性顯示。另
穩定與信賴的傳送控制信號至DBU, 外配置靜態事件紀錄器 (SER,Static
使全系統更具穩定性與可靠度。 Event Recorder) 用於時間軸上紀錄行
頭尾車各具中央控制單元 (2 套 車相關物理量,供事故發生時判讀之
CCU,互為備援 ),主要用於監視 依據 [12],[13]。
TMS 之系統層級管理 (master/slave,
捷運技術 第55期, 2020 46