
Page 90 - 捷運工程叢書 精進版 - 21 捷運電聯車實務
P. 90
臺北市政府捷運工程局
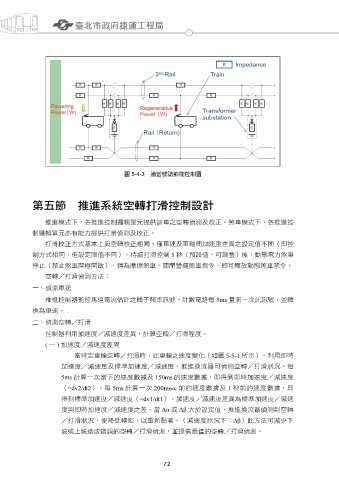
圖 5-4-3 適當號誌節能控制圖
第五節 推進系統空轉打滑控制設計
推進模式下,各推進控制邏輯單元提供該車之空轉偵測及校正。煞車模式下,各推進控
制邏輯單元亦有能力提供打滑偵測及校正。
打滑校正方式基本上與空轉校正相同,僅車速及車軸間加速度差異之設定值不同(即控
制方式相同,但設定限值不同)。持續打滑控制 5 秒(預設值,可調整)後,動態電力煞車
停止(禁止煞車閘極開啟),轉為摩擦煞車。關閉營運煞車指令,即可釋放動態煞車禁令。
空轉/打滑偵測方法:
一、偵測車速
推進控制器監控馬達電流估計之轉子頻率訊號。計數電路每 5ms 量測一次此訊號,並轉
換為車速。
二、偵測空轉/打滑
控制器利用加速度/減速度差異,計算空轉/打滑程度。
( 一 ) 加速度/減速度差異
當特定車輪空轉/打滑時,此車輪之速度變化(如圖 5-5-1 所示)。利用即時
加速度/減速度及標準加速度/減速度,推進換流器可偵測空轉/打滑狀況。每
5ms 計算一次當下的速度數據及 150ms 的速度數據,即得到即時加速度/減速度
(=dv2/dt2)。每 5ms 計算一次 200msec 前的速度數據及 1 秒前的速度數據,即
得到標準加速度/減速度(=dv1/dt1)。加速度/減速度差異為標準加速度/減速
度與即時加速度/減速度之差。當 Δα 或 Δβ 大於設定值,推進換流器偵測到空轉
/打滑狀況,便降低轉矩,以重新黏著。(減速度狀況下:Δβ)此方法可減少下
坡或上坡造成錯誤的空轉/打滑偵測,並提供最佳的空轉/打滑偵測。
72 73