
Page 88 - 捷運工程叢書 精進版 - 21 捷運電聯車實務
P. 88
臺北市政府捷運工程局
由上表可知,手動操作時輸入 A B C 表示 7 種狀態,自動操作時由 ATO 類
比信號轉換成 PWM 信號輸出,以不同的脈波寬度表示牽引力或煞車力之需求,
最低 4 mA 轉換成 4% 輸出,最高 20mA 轉換成 90% 輸出,其振幅相當於電池電
壓,正常狀況為 37.5V 或 110V。介於 4mA 與 20mA 之間信號,成比例輸出 PWM
從 4% 至 90%,且經由 EBR 及 PCR 控制,成比例輸出從 0 至 100% 之煞車力或牽
引力。ATO 類比信號有其誤差範圍,高於 90% PWM 輸出時,如在加速階層且低
於 21.49mA,牽引力保持 100% 輸出,若高於 21.49mA,牽引力降為 0,列車成為
COAST 狀態。如在煞車階層且高於 20mA 時,為確保安全,啟動完全應用摩擦力
之緊急煞車。
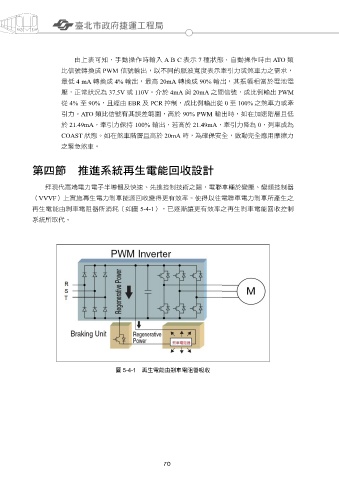
第四節 推進系統再生電能回收設計
拜現代高端電力電子半導體及快速、先進控制技術之賜,電聯車輛於變壓、變頻控制器
(VVVF)上實施再生電力剎車能源回收變得更有效率。使得以往電聯車電力剎車所產生之
再生電能由剎車電阻器所消耗(如圖 5-4-1),已逐漸讓更有效率之再生剎車電能回收控制
系統所取代。
圖 5-4-1 再生電能由剎車電阻器吸收
70 71