
Page 147 - 捷運技術 第51期
P. 147
捷運技術 第51期 143
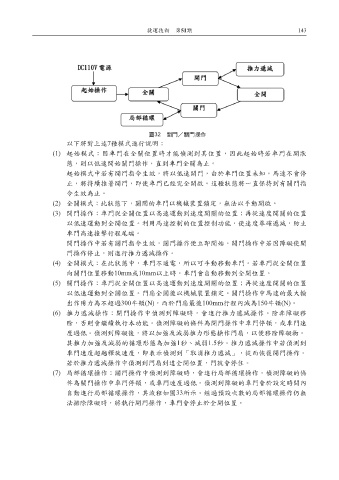
圖32 開門/關門操作
以下將對上述7種模式進行說明:
(1) 起始模式:因車門在全關位置時才能偵測到其位置,因此起始時若車門在開狀
態,則以低速開始關門操作,直到車門全關為止。
起始模式中若有開門指令生效,將以低速開門,由於車門位置未知,馬達不會停
止,將持續推著開門,即使車門已經完全開啟。這種狀態將一直保持到有關門指
令生效為止。
(2) 全關模式:此狀態下,關閉的車門以機械裝置鎖定,無法以手動開啟。
(3) 開門操作:車門從全關位置以高速運動到速度開關的位置;再從速度開關的位置
以低速運動到全開位置。利用馬達控制的位置控制功能,使速度準確遞減,防止
車門高速撞擊行程尾端。
開門操作中若有關門指令生效,關門操作便立即開始。開門操作中若因障礙使開
門操作停止,則進行推力遞減操作。
(4) 全開模式:在此狀態中,車門不通電,所以可手動移動車門。若車門從全開位置
向關門位置移動10mm或10mm以上時,車門會自動移動到全開位置。
(5) 關門操作:車門從全開位置以高速運動到速度開關的位置;再從速度開關的位置
以低速運動到全關位置。門扇全關後以機械裝置鎖定。關門操作中馬達的最大輸
出作用力為不超過300牛頓(N),而於門扇最後100mm行程內減為150牛頓(N)。
(6) 推力遞減操作:開門操作中偵測到障礙時,會進行推力遞減操作。除非障礙移
除,否則會繼續執行本功能。偵測障礙的條件為開門操作中車門停頓,或車門速
度過低。偵測到障礙後,將以加強及減弱推力形態操作門扇,以便移除障礙物。
其推力加強及減弱的循環形態為加強1秒、減弱1.5秒。推力遞減操作中若偵測到
車門速度超越釋放速度,即表示偵測到「取消推力遞減」,從而恢復開門操作。
若於推力遞減操作中偵測到門扇到達全開位置,門就會停住。
(7) 局部循環操作:關門操作中偵測到障礙時,會進行局部循環操作。偵測障礙的條
件為關門操作中車門停頓,或車門速度過低。偵測到障礙的車門會於設定時間內
自動進行局部循環操作,其流程如圖33所示。經過預設次數的局部循環操作仍無
法排除障礙時,將執行開門操作,車門會停止於全開位置。