
Page 44 - 捷運技術 第55期
P. 44
全自動無人駕駛系統(TMS)之技術應用---以環狀線TMS設計為例|范清欽等
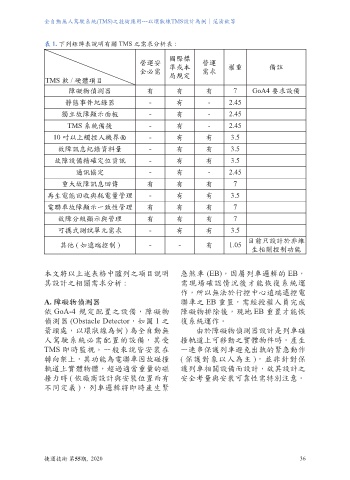
表 1. 下列矩陣表說明有關 TMS 之需求分析表 :
國際標
營運安 營運
全必需 準或本 需求 權重 備註
TMS 軟 / 硬體項目 局規定
障礙物偵測器 有 有 有 7 GoA4 要求設備
靜態事件紀錄器 - 有 - 2.45
獨立故障顯示面板 - 有 - 2.45
TMS 系統備援 - 有 - 2.45
10 吋以上觸控人機界面 - 有 有 3.5
故障訊息紀錄資料量 - 有 有 3.5
故障設備精確定位資訊 - 有 有 3.5
通訊協定 - 有 - 2.45
重大故障訊息回傳 有 有 有 7
再生電能回收與耗電量管理 - 有 有 3.5
電聯車故障顯示一致性管理 有 有 有 7
故障分級顯示與管理 有 有 有 7
可攜式測試單元需求 - 有 有 3.5
其他 ( 如遠端控制 ) - - 有 1.05 目前只設計於非維
生相關控制功能
本文將以上述表格中臚列之項目說明 急煞車 (EB),因屬列車邏輯的 EB,
其設計之相關需求分析 : 需現場確認情況後才能恢復系統運
作,所以無法於行控中心遠端遙控電
A. 障礙物偵測器 聯車之 EB 重置,需經授權人員完成
依 GoA-4 規定配置之設備,障礙物 障礙物排除後,現地 EB 重置才能恢
偵測器 (Obstacle Detector,如圖 1 之 復系統運作。
箭頭處,以環狀線為例 ) 為全自動無 由於障礙物偵測器設計是列車碰
人駕駛系統必需配置的設備,其受 撞軌道上可移動之實體物件時,產生
TMS 即時監視。一般來說皆安裝在 一連串保護列車避免出軌的緊急動作
轉向架上,其功能為電聯車因故碰撞 ( 保護對象以人為主 ),並非針對保
軌道上實體物體,超過適當重量的碰 護列車相關設備而設計,故其設計之
撞力時 ( 依廠商設計與安裝位置而有 安全考量與安裝可靠性需特別注意。
不同定義 ),列車邏輯將即時產生緊
捷運技術 第55期, 2020 36