
Page 70 - 捷運技術 第54期
P. 70
捷運技術 第54期 民國108年10月
JOURNAL OF RAPID TRANSIT SYSTEMS AND TECHNOLOGY, NO.54, 2019
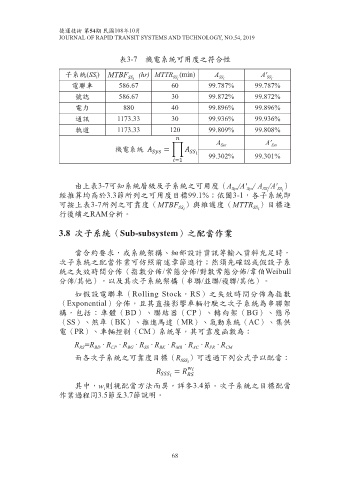
表3-7 機電系統可用度之符合性
子系統(SS ) MTBF SS i (hr) MTTR (min) A SS i A' SS i
SS
i
i
電聯車 586.67 60 99.787% 99.787%
號誌 586.67 30 99.872% 99.872%
電力 880 40 99.896% 99.896%
通訊 1173.33 30 99.936% 99.936%
軌道 1173.33 120 99.809% 99.808%
A Sys A' Sys
機電系統
99.302% 99.301%
由上表3-7可知系統層級及子系統之可用度(A /A' / A /A' )
SS
Sys
Sys
SS
i
i
經推算均高於3.3節所列之可用度目標99.1%;依圖3-1,各子系統即
可按上表3-7所列之可靠度(MTBF )與維護度(MTTR )目標進
SS
SS
i
i
行後續之RAM分析。
3.8 次子系統(Sub-subsystem)之配當作業
當合約要求,或系統架構、細部設計資訊等輸入資料充足時,
次子系統之配當作業可仿照前述章節進行;然須先確認或假設子系
統之失效時間分佈(指數分佈/常態分佈/對數常態分佈/韋伯Weibull
分佈/其他),以及其次子系統架構(串聯/並聯/複聯/其他)。
如假設電聯車(Rolling Stock,RS)之失效時間分佈為指數
(Exponential)分佈,且其直接影響車輛行駛之次子系統為串聯架
構,包括:車體(BD)、聯結器(CP)、轉向架(BG)、懸吊
(SS)、煞車(BK)、推進馬達(MR)、氣動系統(AC)、集供
電(PR)、車輛控制(CM)系統等,其可靠度函數為:
R =R ∙ R ∙ R ∙ R ∙ R ∙ R ∙ R ∙ R ∙ R CM
PR
AC
CP
BG
RS
BD
MR
BK
SS
而各次子系統之可靠度目標(R SSS i )可透過下列公式予以配當:
其中,w 則視配當方法而異,詳參3.4節。次子系統之目標配當
i
作業過程同3.5節至3.7節說明。
68