
Page 26 - 捷運工程叢書 精進版 - 28 捷運電扶梯與電梯實務
P. 26
第二章 捷運系統電扶梯工程 臺北市政府捷運工程局
1
1 ︰二鏈條之一; 其中
︰二鏈條之一;
22
P :驅動電扶梯所需動力(KW),
m
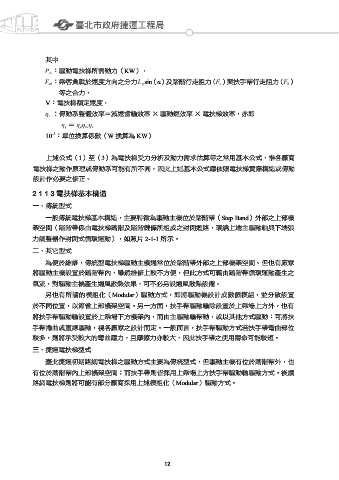
而驅動鏈條張力(詳參圖 2-1-2)
而驅動鏈條張力(詳參圖 2-1-2) F : 乘客負載於速度方向之分力L sin(α)及踏階行走阻力(F )與扶手帶行走阻力(F )
p
sb
s
h
F dc=踏階帶(Step Band)移動所需淨力(F sb)×鏈輪直徑比(γ), 等之合力,
F =踏階帶(Step Band)移動所需淨力(F )× 鏈輪直徑比(γ),
dc
sb
其中 V:電扶梯額定速度,
其中
F sb=乘客負載於速度方向之分力(L psin(α)及踏階行走阻力(F s)與扶手帶行走阻 η ︰傳動系整體效率=減速齒輪效率 × 驅動鏈效率 × 電扶梯效率,亦即
F = 乘客負載於速度方向之分力L sin(α)及踏階行走阻力(F )與扶手帶行走阻力(F ) 1
s
p
sb
h
力(F h)等之合力,亦即, η = η η η
等之合力,亦即: 1 g dc e
F sb= L psin(α)+F s+F h -3
F =L sin(α)+F +F h 10 :單位換算係數(W 換算為 KW)
p
sb
s
L p:乘客負載 (N),
L :乘客負載(N),
p
α:電扶梯傾斜角度,
α:電扶梯傾斜角度, 上述公式(1)至(3)為電扶梯受力分析及動力需求估算等之常用基本公式,惟各廠商
F s:踏階行走阻力(N),
F :踏階行走阻力(N), 電扶梯之動作原理或傳動系可能有所不同,因此上述基本公式應依照電扶梯實際構造或傳動
F h:扶手帶行走阻力(N),
s
F :扶手帶行走阻力(N), 設計作必要之修正。
h
2.1.1.3 電扶梯基本構造
一、傳統型式
一般傳統電扶梯基本構造,主要特徵為驅動主機位於踏階帶(Step Band)外部之上部機
架空間(踏階帶係由電扶梯踏階及踏階鏈條所組成之封閉迴路,環繞上端主驅動軸與下端張
力調整器作封閉式循環運動),如照片 2-1-1 所示。
二、其它型式
為便於維修,傳統型電扶梯驅動主機通常位於踏階帶外部之上部機架空間。但也有廠家
將驅動主機設置於踏階帶內,雖然維修上較不方便,但此方式可藉由踏階帶循環運動產生之
氣流,對驅動主機產生通風散熱效果,可不必另設通風散熱設備。
圖 2-1-2 驅動鏈條張力示意圖
圖 2-1-2 驅動鏈條張力示意圖 另也有所謂的模組化(Modular)驅動方式,即將驅動機設計成數個模組,並分散設置
γ= 主驅動軸上踏階鏈條鏈輪節圓直徑/主驅動軸上驅動鏈條鏈輪節圓直徑,即 於不同位置,以節省上部機架空間。另一方面,扶手帶驅動輪除設置於上乘場上方外,也有
γ=主驅動軸上踏階鏈條鏈輪節圓直徑/主驅動軸上驅動鏈條鏈輪節圓直徑,即 將扶手帶驅動輪設置於上乘場下方機架內,而由主驅動輪帶動,或以其他方式驅動:可將扶
手帶捲曲或直線驅動,視各廠家之設計而定。一般而言,扶手帶驅動方式若扶手帶彎曲部位
較多,則將承受較大的彎曲應力,且摩擦力亦較大,因此扶手帶之使用壽命可能較短。
因此,驅動鏈條張力為
因此,驅動鏈條張力為 三、捷運電扶梯型式
臺北捷運初期路網電扶梯之驅動方式主要為傳統型式,但驅動主機有位於踏階帶外,也
有位於踏階帶內上部機架空間;而扶手帶則皆採用上乘場上方扶手帶驅動輪驅動方式。後續
路網電扶梯則將可能有部分廠商採用上述模組化(Modular)驅動方式。
而驅動電扶梯所需動力則可依公式:動力(P)=力(F)×速度(V)計算之,亦即
而驅動電扶梯所需動力則可依公式:動力(P)=力(F)× 速度(V)計算之,亦即
-3
P m= F sbV ×10 /(η gη dcη e)
-3
= (L P sin(α)+F s+F h) V ×10 ∕(η gη dcη e)… ………………(3)
11 12 13