
Page 292 - 捷運工程叢書 精進版 - 22 捷運號誌系統實務
P. 292
臺北市政府捷運工程局
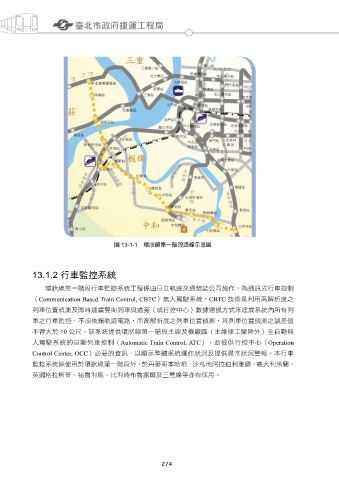
圖 13-1-1 環狀線第一階段路線示意圖
13.1.2 行車監控系統
環狀線第一階段行車監控系統工程係由日立軌道交通號誌公司施作,為通訊式行車控制
(Communication Based Train Control, CBTC)無人駕駛系統,CBTC 技術是利用高解析度之
列車位置偵測及即時連續雙向列車與道旁(或行控中心)數據通訊方式來達成系統內所有列
車之行車監控,不須依賴軌道電路,而高解析度之列車位置偵測,其列車位置偵測之誤差值
不得大於 10 公尺。該系統提供環狀線第一階段主線及機廠區(主維修工廠除外)全自動無
人駕駛系統的自動列車控制(Automatic Train Control, ATC),並提供行控中心(Operation
Control Center, OCC)必要的資訊,以顯示整體系統運作狀況及提供異常狀況警報。本行車
監控系統除使用於環狀線第一階段外,於丹麥哥本哈根、沙烏地阿拉伯利雅德、義大利米蘭、
英國格拉斯哥、祕魯利馬、比利時布魯塞爾及三鶯線等亦有採用。
274 275