
Page 63 - 捷運工程叢書 精進版 - 21 捷運電聯車實務
P. 63
第四章 電聯車轉向架系統
依據 ξ 之數值可分下列三個情況來討論:
(1) ξ> 1.0 過阻尼(Overdamped Case; C>Cc)
(1) ξ> 1.0 過阻尼(Overdamped Case; C>Cc)
(1) ξ> 1.0 過阻尼(Overdamped Case; C>Cc)
根號內為實根,X(t) 變成
根號內為實根,X(t)變成
(1) ξ> 1.0 過阻尼(Overdamped Case; C>Cc)
根號內為實根,X(t)變成
根號內為實根,X(t)變成 2
2
(-ξ+ √ ξ -1)ω n t
(-ξ- √ ξ -1)ω n t
2
2
X(t)=Ae
+Be
(-ξ+ √ ξ -1)ω n t
,其中 A 與 B 為常數
(-ξ- √ ξ -1)ω n t
,其中 A 與 B 為常數
X(t)=Ae
+Be
,其中 A 與 B 為常數
2
2
(-ξ+ √ ξ -1)ω n t
(-ξ- √ ξ -1)ω n t
+Be
X(t)=Ae
,其中 A 與 B 為常數
(2) ξ = 1.0 臨界阻尼(Critical Damping)
(2) ξ = 1.0 臨界阻尼(Critical Damping)
(2) ξ = 1.0 臨界阻尼(Critical Damping)
(2) ξ = 1.0 臨界阻尼(Critical Damping)
通解為X(t)=(A+Bt)e -ω n t
通解為X(t)=(A+Bt)e
通解為 -ω n t
通解為X(t)=(A+Bt)e -ω n t
(3) 0 < ξ < 1.0 為
(3) 0 < ξ < 1.0 為
(3) 0 < ξ < 1.0 為
(3) 0 < ξ < 1.0 為
2
2
-i √ 1-ξ ω n t
i √ 1-ξ ω n t
-ξω n t (Ae i √ 1-ξ ω n t +Be -i √ 1-ξ ω n t
2
2
)
X(t)=e -ξω n t
X(t)=e (Ae i √ 1-ξ ω n t +Be -i √ 1-ξ ω n t )
2
2
-ξω n t
(Ae
+Be
X(t)=e
以上可由圖形(圖 4-3-3)來對照。
以上可由圖形(圖 4-3-3)來對照。 )
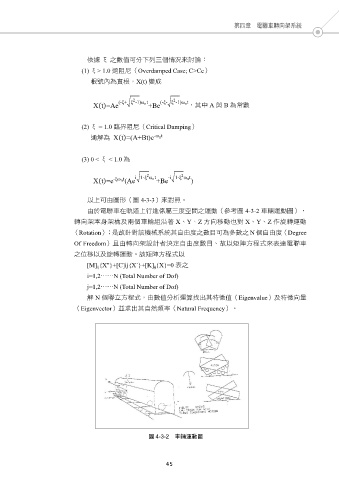
由於電聯車在軌道上行進係屬三度空間之運動(參考圖 4-3-2 車輛運動圖),轉向架本身架構
以上可由圖形(圖 4-3-3)來對照。
由於電聯車在軌道上行進係屬三度空間之運動(參考圖 4-3-2 車輛運動圖),轉向架本身架構
以上可由圖形(圖 4-3-3)來對照。
及兩個車輪組沿著 X、Y、Z 方向移動也對 X、Y、Z 作旋轉運動(Rotation);是故針對該機
由於電聯車在軌道上行進係屬三度空間之運動(參考圖 4-3-2 車輛運動圖),轉向架本身架構
及兩個車輪組沿著 X、Y、Z 方向移動也對 X、Y、Z 作旋轉運動(Rotation);是故針對該機
由於電聯車在軌道上行進係屬三度空間之運動(參考圖 4-3-2 車輛運動圖),
械系統其自由度之數目可為多數之 N 個自由度(Degree Of Freedom)且由轉向架設計者決
及兩個車輪組沿著 X、Y、Z 方向移動也對 X、Y、Z 作旋轉運動(Rotation);是故針對該機
械系統其自由度之數目可為多數之 N 個自由度(Degree Of Freedom)且由轉向架設計者決
轉向架本身架構及兩個車輪組沿著 X、Y、Z 方向移動也對 X、Y、Z 作旋轉運動
械系統其自由度之數目可為多數之 N 個自由度(Degree Of Freedom)且由轉向架設計者決
定自由度數目、故以矩陣方程式來表達電聯車之位移以及旋轉運動。該矩陣方程式以
定自由度數目、故以矩陣方程式來表達電聯車之位移以及旋轉運動。該矩陣方程式以
(Rotation);是故針對該機械系統其自由度之數目可為多數之 N 個自由度(Degree
[M] ij{X"}+[C]ij{X`}+[K] ij{X}=0 表之
定自由度數目、故以矩陣方程式來表達電聯車之位移以及旋轉運動。該矩陣方程式以
[M] ij{X"}+[C]ij{X`}+[K] ij{X}=0 表之
Of Freedom)且由轉向架設計者決定自由度數目、故以矩陣方程式來表達電聯車
i=1,2……N (Total Number of Dof)
[M] ij{X"}+[C]ij{X`}+[K] ij{X}=0 表之
i=1,2……N (Total Number of Dof)
之位移以及旋轉運動。該矩陣方程式以
j=1,2……N (Total Number of Dof)
i=1,2……N (Total Number of Dof)
j=1,2……N (Total Number of Dof)
[M] {X"}+[C]ij{X`}+[K] {X}=0 表之
ij
解 N 個聯立方程式,由數值分析運算找出其特徵值(Eigenvalue)及特徵向量(Eigenvector)
ij
j=1,2……N (Total Number of Dof)
解 N 個聯立方程式,由數值分析運算找出其特徵值(Eigenvalue)及特徵向量(Eigenvector)
i=1,2……N (Total Number of Dof)
解 N 個聯立方程式,由數值分析運算找出其特徵值(Eigenvalue)及特徵向量(Eigenvector)
並求出其自然頻率(Natural Frequency)。
並求出其自然頻率(Natural Frequency)。
j=1,2……N (Total Number of Dof)
並求出其自然頻率(Natural Frequency)。
解 N 個聯立方程式,由數值分析運算找出其特徵值(Eigenvalue)及特徵向量
(Eigenvector)並求出其自然頻率(Natural Frequency)。
圖 4-3-2 車輛運動圖
圖 4-3-2 車輛運動圖
圖 4-3-2 車輛運動圖
圖 4-3-2 車輛運動圖
45
43
43
43