
Page 144 - 捷運工程叢書 精進版 - 12 捷運工程多條隧道鄰近堆疊施工實務
P. 144
臺北市政府捷運工程局
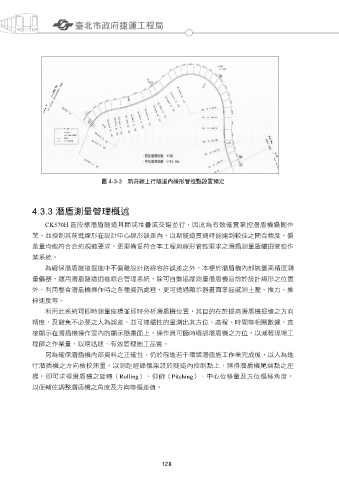
圖 4-3-3 新莊線上行隧道內線形管控點設置預定
4.3.3 潛盾測量管理概述
CK570H 區段標潛盾隧道其間或堆疊或交錯並行,因此為有效確實掌控潛盾機鑽掘作
業,並控制其前進線形在設計中心線形誤差內,以期隧道貫通時能達到較佳之閉合精度,偏
差量均能符合合約規範要求,更需備妥符合本工程與線形管控需求之潛盾測量暨鑽掘管控作
業系統。
為確保潛盾隧道掘進中不偏離設計路線容許誤差之外,本標於潛盾機內部裝置高精度測
量儀器,運用潛盾隧道掘進綜合管理系統,除可自動追蹤測量潛盾機目前於設計線形之位置
外,利用整合潛盾機操作時之各種資訊處理,更可透過顯示器畫面掌握感測土壓、推力、推
伸速度等。
利用此系統可即時測量座標並即時分析潛盾機位置,其目的在於提高潛盾機掘進之方向
精度,及避免不必要之人為誤差,並可連續性的量測出其方位、高程、時間等相關數據,直
接顯示在潛盾機操作室內的顯示器畫面上,操作員可隨時確認潛盾機之方位,以減輕現場工
程師之作業量,以期迅速、有效管理施工品質。
另為確保潛盾機內部資料之正確性,仍於前進若干環或潛盾施工作業完成後,以人為進
行潛盾機之方向檢校測量,以測距經緯儀架設於隧道內控制點上,測得潛盾機尾端點之座
標,即可求得潛盾機之旋轉(Rolling)、仰俯(Pitching)、中心位移量及方位偏移角度,
以便輔佐調整潛盾機之角度及方向等偏差值。
128 129