
Page 150 - 捷運工程叢書 精進版 - 12 捷運工程多條隧道鄰近堆疊施工實務
P. 150
臺北市政府捷運工程局
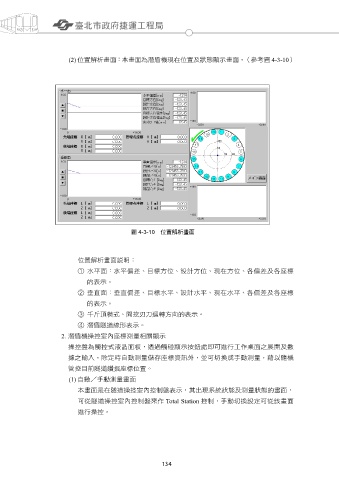
(2) 位置解析畫面:本畫面為潛盾機現在位置及狀態顯示畫面。(參考圖 4-3-10)
圖 4-3-10 位置解析畫面
位置解析畫面說明:
① 水平面:水平偏差、目標方位、設計方位、現在方位、各偏差及各座標
的表示。
② 垂直面:垂直偏差、目標水平、設計水平、現在水平、各偏差及各座標
的表示。
③ 千斤頂模式、開挖刃刀迴轉方向的表示。
④ 潛盾隧道線形表示。
2. 潛盾機操控室內座標測量相關顯示
操控盤為觸控式液晶面板,透過觸碰顯示按鈕處即可進行工作桌面之展開及數
據之輸入。除定時自動測量儲存座標資訊外,並可切換成手動測量,藉以隨機
管控目前隧道鑽掘座標位置。
(1) 自動/手動測量畫面
本畫面是在隧道操控室內控制盤表示,其出現系統狀態及測量狀態的畫面,
可從隧道操控室內控制盤來作 Total Station 控制,手動切換設定可從該畫面
進行操控。
134 135